- Latvijā radīti roboti izlūkošanai un arī govju barošanai.
- Strādā pie mēģinājumiem iemācīt robotu lemt cilvēka manierē.
- Latvijā radītie sumo roboti pirms dažiem gadiem veiksmīgi sevi pieteica spēcīgāko ringā.
- Latvijas zinātnieki strādā pie autobūvē izmantoto robotu uzlabošanas.
- Cilvēku glābšanai izstrādā sistēmu, kas atpazītu cilvēkus un spētu saprast, kuram pirmajam nepieciešama palīdzība.
- Cilvēku simulējošus manekenus izmanto mediķu apmācībā un trenēšanā.
Roboti izlūkošanai un govju barošanai
Vienam no Latvijā radītajiem robotiem pa spēkam ir rāpties pa sienām un klusi pielavīties telpai, kurā to neviens negaida. Taču Latvijā tapušie roboti pielietojumu raduši ne tikai izlūkošanā, bet arī govju barošanā. Tāds ir barības piestūmējs, saukts arī par liellopu galda kārtotāju, kas izpelnījies atzinību kā viens no Latvijas zinātnes sasniegumiem
“Faktiski tā ir vairāku robotu sistēma. Tie ne tikai ir kopā salikti, bet arī sadarbojas, spēj viens otru aizvietot, automātiski sadalīt uzdevumus. Tādā veidā virzīt mūs uz individuāliem sasniegumiem.
Mēs esam aculiecinieki tam, kā mainās industrija no masveida ražošanas uz masveida individuālo ražošanu.
Tā ir 3D druka ir kā pirmais vēstnesis. Plaši tiks izmantotas automatizētas iekārtas, tostarp mobilie roboti, arī netradicionālās jomās, kas līdz šim tika uzskatītas par vāji robotizētam, tajā skaitā arī lauksaimniecībā,” norāda Rīgas Tehniskās universitātes (RTU) Mākslīgā intelekta un sistēmu inženierijas katedras profesors Agris Ņikitenko.
Šis robots spēj aizstāt cilvēku, sagatavojot un piestumjot liellopiem precīzi tiem atlasīto barību. Lai piena izslaukums būtu lielāks, ļoti būtiski ir veidot pareizas dzīvnieku ēdienkartes, un šis robots to lieliski spēj izdarīt, jo tam nav grūti stundām veikt vienu un to pašu darbu ar vislielāko precizitāti. Tieši šī īpašība ir robotu stiprā puse, salīdzinot ar cilvēkiem.
Tas, ko sauc par cilvēcisko faktoru, tā ir cilvēka nemainīgā spēja kļūdīties. Šīs kļūdas izskauž, aizvietojot cilvēka darbu ar autopilotiem. “Robotu izmantošana dod iespēju cilvēkam izmantot savu radošo potenciālu, nevis izpildīt monotonus darbus, kas nav saistīti ne ar radošumu, ne personības attīstītību, kuras drīzāk pat ir personību degradējošas,” saka Ņikitenko.
Robotu gadījumā nav jāgādā par darbinieka motivēšanu un to, lai būtu interesanti un iespēja attīstīties. Lai kvalitāte būtu nemainīgi laba, robots vienīgi jāuztur tehniskā kārtībā.
Iemācīt robotu lemt cilvēka manierē
Tomēr, lai arī automatizēta iekārta ir piemērota mehāniskam, monotonam darbam, tai jābūt ar “smadzenēm”. Tās vajadzīgas, lai saprastu, kur robots atrodas un kādi šķēršļi atrodas. Robotam ir skaļruņi, uztverošie sensori, kas mēra attālumu līdzīgi kā acis, kuras nosaka, ka priekšā ir kāds objekts. Tas nav vienkārši attēls.
Lai arī robotam nosacīti ir viss tas, kas cilvēka smadzenēs nodrošina impulsu raidīšanu, signālu saņemšanu un maņu orgānu darbību, robota un cilvēku smadzenes darbojas pēc ļoti atšķirīgiem principiem.
Tomēr RTU Mākslīgā intelekta un sistēmu inženierijas katedras pētnieks Kārlis Berkolds norāda uz būtisku starpību starp cilvēku un robotu: “Mūsu smadzenēs procesi visu laiku notiek paralēli un ļoti daudz visu mūsu dzīvi. Robotiem “neironi” nedarbojas paralēli, tas nozīmē, ka tikai dažas lietas tie var darīt vienlaikus. Tie spēj veikt sarežģītāku skaitļošanu, bet tas arī viss.
Tā ir lielākā atšķirība – mums daudzas lietas notiek reizē, bet robotiem tas notiek diezgan secīgi.”
Līdzīgi kā cilvēki vadās pēc zvaigznēm, to dara arī roboti, tikai viņu “polārzvaigznes” izskatās citādi. Tās jāpiestiprina pie griestiem, un tad robots var atrast sev ceļu.
Ir vairākas pieejas, kā iemācīt robotu saprast, kurus signālus jāņem vērā un kurus jāignorē. Viena no tām ir vēlamo darbību parādīšana priekšā, dodot rīcības instrukcijas. Ja robots šādā gadījumā sastopas ar kādu līdz šim nepieredzētu situāciju, tas meklē tuvāko līdzinieci un izspēlē iepriekš iemācīto scenāriju. Taču ir arī otrs variants – pateikt robotam, kāds ir sasniedzamais rezultāts un likt tam analizēt sakarības starp dažādām lietām un piemeklēt tuvāko līdzinieku. Tā roboti darbojas zivju pārstrādes rūpnīcās, kur neskaitāmi vienādojumi, algoritmi un piemēri robotu noved pie pareizajiem lēmumiem, šķirojot zivis.
Tas ir liels izaicinājums matemātiski aprakstīt pareizo zivi. Tāpēc robota neironu tīklam parāda daudz dažādu zivju attēlus: kāda pareizā suga, pareizais novietojums, bojājums, ir zivs, nav zivs. Izmantojot šādus neironu tīklus, ātri var iemācīt atšķirības.
Taču, kas viegli saprotams cilvēkam, grūti izpildāms robotam un otrādi. Proti, aiziet uz veikalu pēc maizes robotam ir grūts uzdevums, jo jāatbild uz daudziem neskaidriem jautājumiem: kas ir pirkt, kas ir maize, kur ir veikals, kur lētāk, kura ir laba maize.
Tāpēc lai uzbūvētu robotu, kas spēj pieņemt lēmumus cilvēka manierē, jātiek skaidrībā ar daudz ko, kas notiek cilvēka galvā,
kur pat veicot elementāras darbības notiek daudzi paralēli procesi, par kuriem pat neizdomājamies.
Latvijā radītie sumo roboti
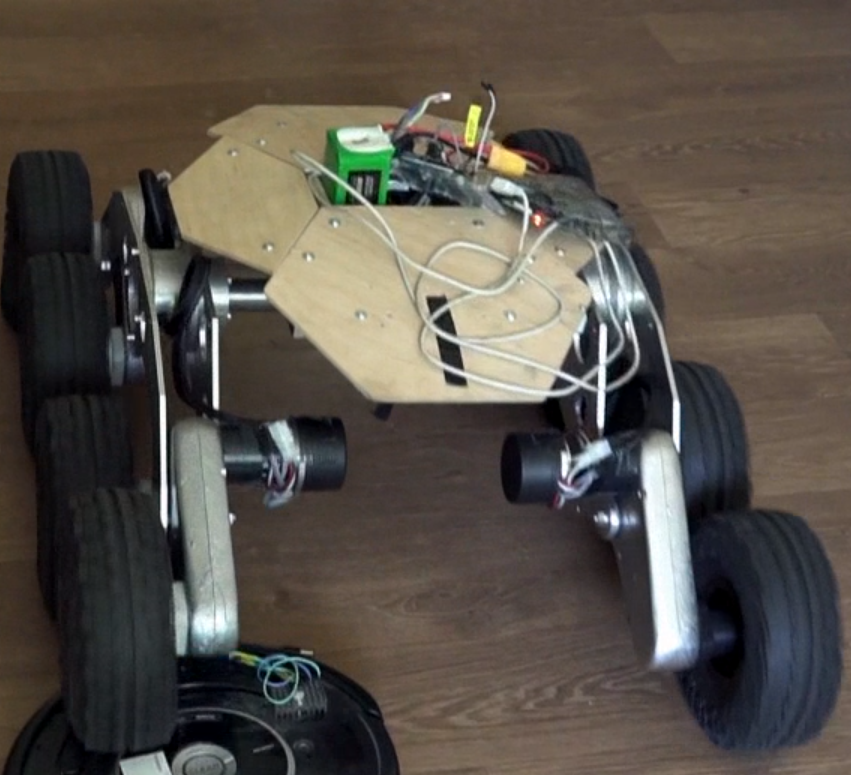
Ja Japāna slavena ar sumo cīkstoņiem, Latvija – ar sumo robotiem, kas pirms dažiem gadiem veiksmīgi sevi pieteica spēcīgāko ringā. LTV raidījums “Izziņas impulss” viesojās laboratorija, kur tie top. Tur darbojas nevis robotu ražošanas guru, bet gan cilvēki, kuru vaļasprieks ir darbadienu vakaros sanākt kopā, veidojot ko jaunu, pārvarot izaicinājumus un dalītos padomos. Katrs tur strādāt pie sava robota, kuru uzdevums būs doties ringā un gluži kā sumo cīkstonim izstumt no tā pretinieku.
“Mums ir visprestižākā kategorija - mega sumo, kas aizsākuši visu robotu sumo Japānā pirms 28 gadiem. Tam robotam, kurš uzvarēja, priekšā nebija sensoru. Tā priekšrocība ir, ka izmanto sensoru vājo vietu. Ja ir priekšējais leņķis, tad sensors skatās ar infrasarkano kameru, vai arī, ja ir melns, tad atstarojas un pretinieks tādu robotu “neredz”. Tas robots, kas uzvarēja, bija “akls”, bet vienlaikus arī pats neredzams. Tā bija šī robota odziņa, kas ļāva tam uzvarēt,” stāsta RTU Dizaina fabrikas vecākais eksperts Gundars Miezītis.

Ne tikai ātrākais, bet gudrākais robots jāspēj uzbūvēt, meklējot viltīgākos maskēšanās paņēmienus un ievērojot svara un izmēra ierobežojumus.
Kamēr roboti top, katrs tā veidotājs izjūt, ko nozīmē kaut ko sadedzināt vai pietiekoši nesalodēt, pazaudēt vai nepareizi samērīt. Taču tas nemazina azartu, ar kādu cilvēki nododas robotu būvēšanai – katra paša ziņā ir izstrādāt tā mehānisko daļu, izveidot elektroniku un saprogrammēt.
Robotu spēja kustēties, pagriezties un apstāties ir tūkstošiem garu uzdevumu rindas rezultāts, kas neskaitāmas reizes pārbaudīts un uzlabots.
“Viena no metodēm, kā panākt rezultātu – laižam robotu, filmējam, skatāmies, kas kļūdaini uztaisīts, kas darbojas efektīvi. Mēģinām simulēt viņa darbību. Ir dažādas programmas, kas darbina motorus, lasa sensorus, rāda uz displeja un izsauc citas mazas atbildes reakcijas jeb programmas,” stāsta robotikas entuziasts Uģis Bergfelds.
Programmatūra parūpējas par robota spējām pieņemt lēmumus, bet neaizvietojams palīgs tā fiziskajās spējās ir robota dizains. Piemēram, lai labāk izbrauktu pagriezienus, robotam taisa slīpas riepas. Tam jau ir pielietojums ikdienā, jo par šādu risinājumu sāk aizdomāties arī autoražotāji.
Varētu domāt, kāds gan labums no tā, ka dažu cilvēku aizraušanās ir robotu būvēšana un to sacensības.
Taču jebkurš šāds mazs vai liels robots ir stāsts par to, ka cilvēki ir iemācījušies atrast vislabākos elektronikas un programmēšanas risinājumus un viņu prasmes tālāk izmanto jebkura cita industrija.
Un sumo robotu cīņa ringā ir kas daudz vairāk par pareizu robotu novietošanu un uzvaras prieku. Cīņa ir ātra un reakcija robotam vēl jo ātrāka. Par pašu cīnīšanos sacensību laikā cilvēks vairs neatbild, jo robotā viss jau saprogrammēts. Uz tā palaidēja pleciem paliek vien robota pareiza novietošana un pretinieka stratēģijas paredzēšana.
Latvijā uzlabo autobūves robotus
Robotus izmanto arī autobūvē. Mūsdienās automašīnas top no liela metāla ruļļa, kuru sapresē, izveidojot atsevišķus metāla gabalus, kas tālāk veido automašīnas virsbūvi. To savienošanā neaizvietojami ir roboti.
“Mūsdienu automobilis var tikt sastiprināts gan metinot, gan līmējot, gan kniedējot. Ir ļoti daudzi tūkstoši metinājuma punktu automobilī. Ja to visu būtu jāizdara ar cilvēka rokām, būtu liels apjoms un diez vai rūpnīcas sasniegtu tādus produkcijas izlaides tempus. Viens no lielākajiem plusiem robotam – tas spēj ilgstoši, precīzi atkārtot monotonu darbu, kas ir problēma cilvēkam. RTU rīcībā ir unikāla robota roka, kas ir neaizvietojama,” stāsta RTU Industriālās elektronikas un elektrotehnoloģiju katedras pētnieks Armands Šenfelds.
Roboti cilvēku aizvieto ne tikai ar savu precizitāti un spēju darīt vienveidīgu darbu, bet arī prasmēm vienlaicīgi būt viss, kas vien vajadzīgs.
Vienā robota rokā iesējams apvienot vairāku darbinieku darbības vienlaikus. Ne jau velti šai rokai ir sešas locītavas, kas robotā ieguvušas motoru veidolu. “Šeit ir seši elektriski motori, kur katrs atbild par savu locītavas kustību. Motorus vada dators, ar speciālu enerģijas pārveidotāja palīdzību. Un viss tiek tā darīts, lai sekotu noteiktai kustības trajektorijai, kas aprakstīta programmas veidā,” skaidro Šenfelds.
Šis robots, atkārtojot darbības, katrā punktā pieskaras ar ļoti lielu precizitāti. Lai to nodrošinātu, jābūt arī stabilai pamatnei, uz kuras kustīgais robots novietots. “Robotam ir arī tāds kā saspiesta gaisa amortizators, kas palīdz kompensēt svaru, kad tas aizsniedzas pārāk tālu un mēģina tikt atpakaļ. Gaisa atspere velk to atpakaļ kā mākslīgs muskulis, kas palīdz elektromotoriem. Te ir arī kabelis, kas savieno “sirdi” ar “smadzenēm”. Tas pievada enerģiju dzinējiem, lai robots var kustēties,” stāsta pētnieks.
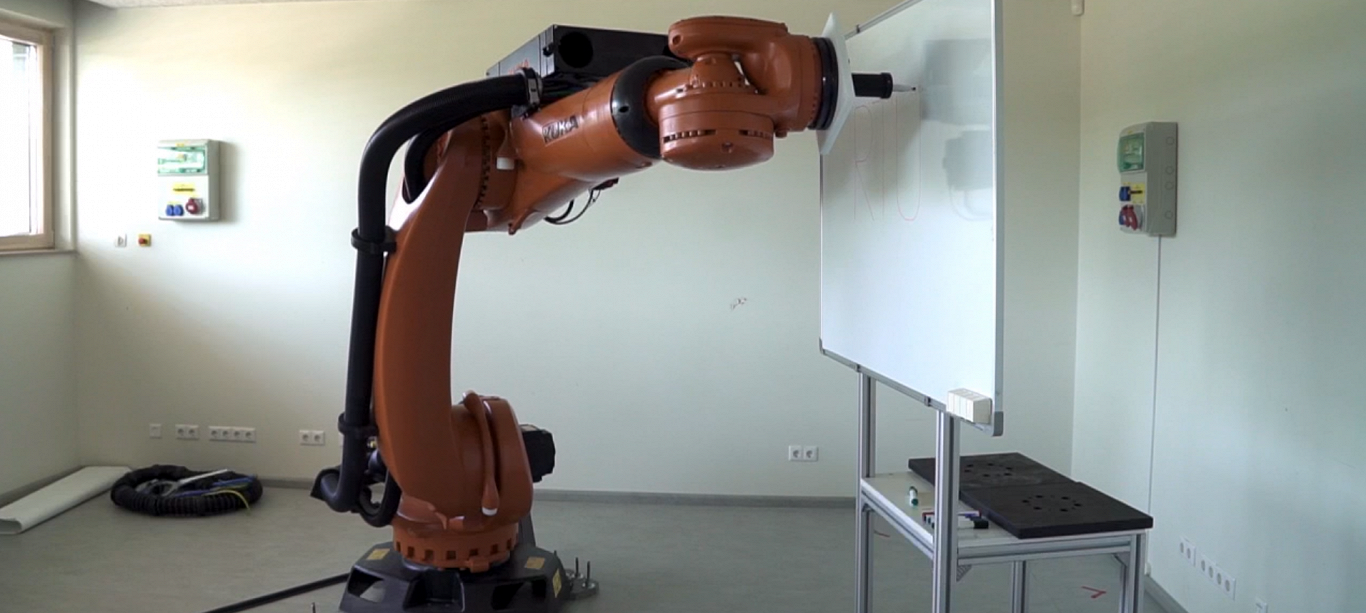
Kustoties šajā gadījumā robots raksta, lai iemācītos saprast, kur ir darba virsma un kurā punktā kas precīzi jādara. Lai uzrakstītu vienkāršus burtus, šai rokai katra darbība vispirms jāieprogrammē. Šajā gadījumā tiek norādītas precīzas koordinātes, kur un kādā brīdī jāatrodas.
Šīs automatizētās un robotizētās rokas uzlabošanā savu roku pielikuši arī Latvijas zinātnieki.
RTU zinātnieki nākuši klajā ar ideju, kas ieinteresējusi “Daimler” autorūpnīcu Vācijā.
“Mercedes” ražotāji ar šo robotu iecerējuši ietaupīt labi daudz naudas, jo tas spēj daļu izmantotās enerģijas atgūt. Proti, ja rūpnīcā roboti strādā vairāki vienkopus, tie spēj izmantot cits cita enerģiju, kas noteiktos kustību brīžos paliek pāri.
“Ja uztveram robotu kā balerīnu, tad esam secinājuši, ka uzliekot 210 kilogramus un dinamiski kustinot, mēs varam līdz pat 20% no kustību enerģijas samazināt, ja būtu iespēja to savākt atpakaļ,” atklāj Šenfelds.
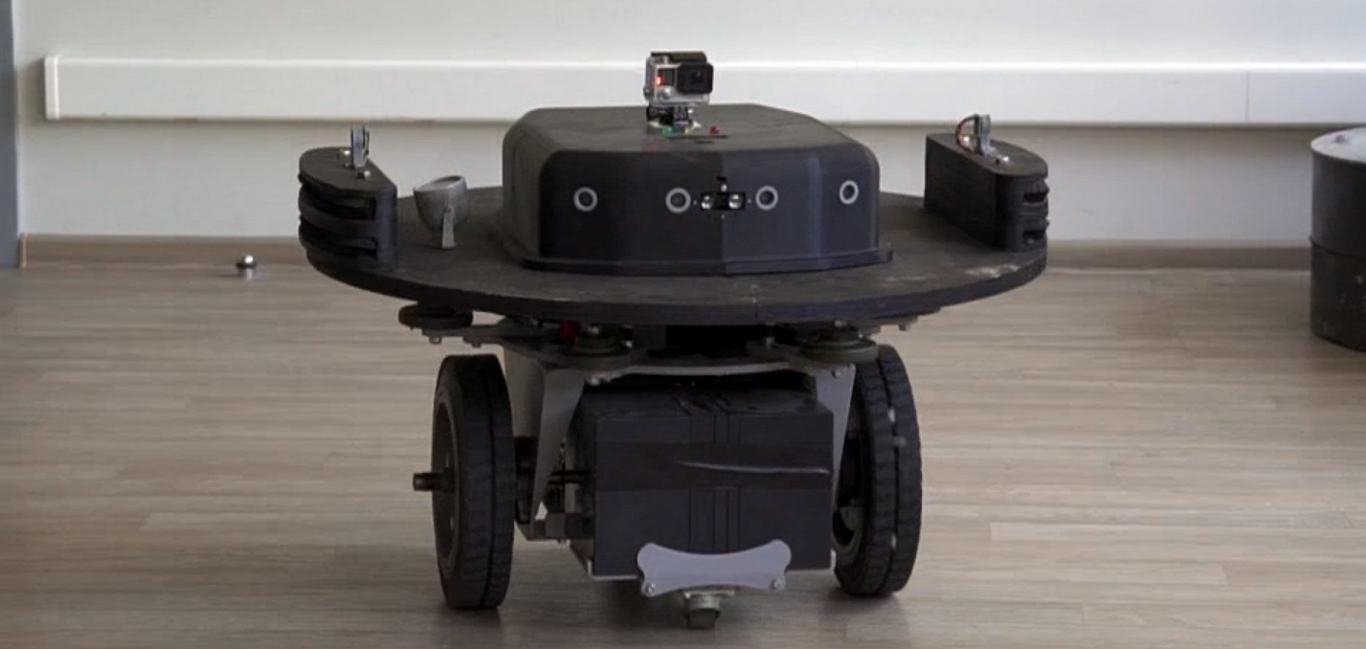
Robots cilvēku glābšanai
RTU veiksmes stāsta pielietojumu var atrast ne tikai autorūpnīca, bet arī pasaulē sarežģītākajā būvē. Vietā, kur atveido Visuma dzimšanu, darbiņš darāms varētu būt arī Latvija robotiem.
Brīdi, kas sekoja uzreiz pēc Lielā Sprādziena, atdarina Eiropas kodolpētījumu centra CERN pazemes tunelī staro Franciju un Šveici. Tur teju gaismas ātrumā pārvietojas mazas daļiņas. Kad tunelī jāveic tehniskās apkopes darbi, tur uzturas daudz cilvēku, kuriem 27 kilometru garajā tunelī risku rada pēkšņas traumas vai ugunsgrēki.

RTU izstrādā sistēmu, kas atpazītu cilvēkus un vajadzības gadījumā spētu saprast, kuram no cietušajiem pirmajam nepieciešama neatliekamā palīdzība.
“Izlūkošana ir svarīga, lai dotu informāciju glābšanas brigādēm. Lai tiktu iekšā tunelī, glābējiem vajag 20 minūtes, lai no sākuma punkta tiktu līdz tālākajai daļai. To laikā būtu svarīgi uzzināt vairāk informācijas, kas konkrēti ir noticis, lai varētu izvēlēties glābšanas stratēģiju un saplānot, kā organizēt glābšanas darbus,” stāsta RTU doktorants Artūrs Ivanovs.
Pašlaik zinātnieki strādā pie tā, lai šādi izlūki varētu arī dzēst ugunsgrēkus. Bet būtiskāk par dzēšanas sistēmu uzstādīšanu ir apvienot no sensoriem iegūtos datus un panākt, lai robots atpazīst cilvēkus. Tam nepieciešams radars un infrasarkano staru kamera.
“Radars pasaka, cik tālu vai tuvu objekts ir un vai tas ir kustīgs vai nekustīgs. Tāpat tas var pateikt, ka divu metru attālumā ir kustīgs objekts, nezinot kāds tieši. Pieliekot klāt termo kameru, var nolasīt arī siltuma datus. Ja redz, ka ķermenis, kas kustas, ir līdzīgs cilvēkam, tad ar aptuveni 90% precizitāti var pateikt, ka tas ir cilvēks,” skaidro Ivanovs.
Pēc tam, kad robots atpazinis tunelī esošo objektu, tam jāsaprot, vai cilvēks ir dzīvs un pie samaņas. Arī to noteikt palīdz sensoru datu analīze.
“Sapludinot sensorus, var iegūt informāciju par kustību daudzumu, tostarp plaušu kustību un sirdsdarbību.
Pateicoties kamerai, var saņem informāciju par siltuma ainu, kuru izstaro cilvēks,” stāsta pētnieks.
Manekeni cilvēka atveidošanai
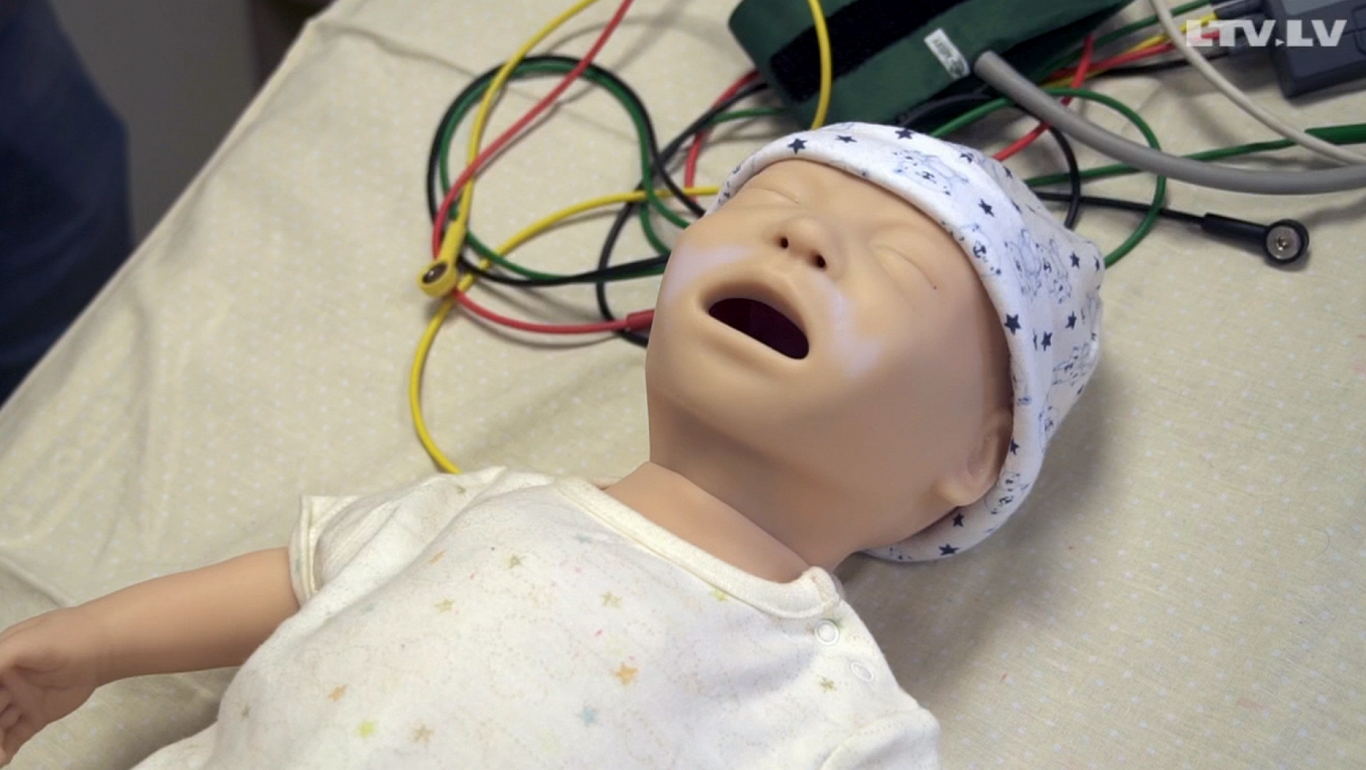
Pazemes tunelī robots kādudien meklēs cilvēkus un mēģinās tos glābt, bet cilvēku glābšana kritiskos brīžos labu laiku ir mediķu ikdiena. Lai labāk tam sagatavotos, talkā nāk ja ne robots, tad lelle, kas brīžiem var reaģēt kā dzīvs cilvēks.
Rīgas Stradiņa universitātes (RSU) Klīnisko prasmju un medicīnas tehnoloģiju katedras docents Reinis Balmaks rāda manekenu, kas simulē bērnu: “Lūk, tagad bērnam nav tonusa, tā izskatās krampji. Tāds izskatās bērns ar tonusu, tā uzvedas, kad to pazaudē. Ja paliek zils un beidz raudāt, tas jāuztver kā signāls, ka kaut kas aizdomīgs notiek. Šādi izklausās puslīdz normāla raudāšana, tā izklausās, kad bērns sten un tas nozīmē, ka viņam ir grūti.”
Šim improvizētajam pacientam ir iespējams veikt kardiogrammu, ekrānā nolasīt arī temperatūras un spiediena rādījumus. To var arī elpināt un atjaunot tā sirdsdarbību, liekot lietā īstus instrumentus.
Lai glābtu pacientu dzīvības kritiskos brīžos, vispirms dažādi scenāriji ir jāizspēlē. Tā jaunie ārsti mācās cīnīties par mazuļa dzīvību, meklējot, kas noticis.
Viss notiek kā reālajā dzīvē – tiek doti medikamenti, veikti mērījumi un saņemti analīžu rezultāti.
Simulāciju vadīšana nozīme ne tikai to, ka jāpanāk, lai pacientam parādās visi iepriekš paredzētie simptomi, bet arī jāspēj reaģēt uz to, kādus lēmumus pieņem ārsti. Lai arī simulācijas spraigākais posms paiet pie imitētā pacienta, lielākā daļa laika tiek veltīta, pārrunājot pieļautās kļūdas un analizējot sajūtas. Starp citu, saruna ir būtiska simulācijas sastāvdaļa, arī esot blakus pacientam.
“Ir vairāki scenāriji ar komu. Ja pacients nav tik smagā stāvoklī, ar pacientu ir jāsarunājas, kas ir ļoti svarīgi. Vēl mums ir tāds simulators, kur tek asinis, amputēta roka un tad vajag apturēt asiņošanu. Tajā brīdī redzams, ka studenti dažkārt iznāk ļoti emocionāli, uztraukti, jo tas realitātei ir diezgan pietuvināti,” stāsta Vecākā klīnisko simulāciju speciāliste Jekaterina Zvidriņa.
Spraiga sekošana līdzi notiekošajam it kā mediķu rokās būtu īsts pacients ir neizbēgama, arī vadot simulāciju. Lai arī scenārijs ir iepriekš saprogrammēts un paredzēt studentu rīcību arī nav neiespējami, laiku pa laikam nākas reaģēt uz ļoti neierastiem lēmumiem. Turklāt jāspēj arī neiejaukties brīžos, kad apmācāmie pieļauj kļūdas, kas var izrādīties dzīvībai liktenīgas.
Tiesa, stimulācijās līdz nāvei teju nekad nenonāk. “Mēs cenšamies izvairīties. Esam tā darījuši, bet tad ar ļoti pārdomātu mērķi kaut ko iemācīt. Kā sodu vai neveiksmes uzsvēršanu mēs to nekad nedarām. Tam jābūt kaut kam ļoti vērtīgam, jo mēs negribam nevienu traumēt. Jo citādi no stimulācijām nav jēgas, jo
mērķis ir padarīt mācību drošu, nevis stresa pilnu un nepatīkamu.
Vislabākie scenāriji ir tie, ko esmu redzējis uz dzīviem pacientiem un ko pēc tam mācu rezidentiem. No skolotāja viedokļa tie vislabāk strādā. Un tad ir daudz situāciju, kuras neesmu redzējis ar dzīviem cilvēkiem, bet, ja man tādas radīsies, tad zināšu, ko darīt, jo simulācijā esmu atstrādājis visas kustības,” stāsta RSU Klīnisko prasmju un medicīnas tehnoloģiju katedras docents Reinis Balmaks.
Šajā ziņā mediķi ļoti līdzinās lidmašīnu pilotiem, kuri allaž ir gatavi situācijām, kuras dzīvē nemaz nav piedzīvojuši un kurās labāk nemaz nenonākt. Medicīnā riski ir uz katra soļa, taču tos iespējams mazināt, tiem mērķtiecīgi gatavojoties.
Ārstiem jāmācās ne tikai tāpēc, ka jebkuras prasmes, ja tās nepielieto, ievērojami krītas dažu mēnešu laikā, bet gan tāpēc, ka pacienti mēdz būt tik atšķirīgi. Tas ir īpaši aktuāli, strādājot ar bērniem.
“Bērni ir ļoti atšķirīgi tik daudzās jomās. Vispirms jau viņu augums un svars ir tik mainīgi, un tas būtiski ietekmē medikamentu devas, ko viņiem jādod. Tas nav tā kā ar pieaugušajiem, kad visos gadījumos devas vairāk vai mazāk ir zināmas. Tāpat, ārstējos bērnus, jāpatur prātā, ka viss tas, kas ir normāli kādā noteiktā vecumā, citā vairs nav uzskatāms par normu. Piemēram, normāls sirds sitienu skaits minūtē piecus mēnešus vecam bērnam un gadus vecam bērnam ļoti atšķirsies.
Simulatori nekad nebūs pilnīgi tādi paši kā reālie pacienti, jo reakcija uz simulācijas darbībām, veicot korekcijas datorā, tomēr ir lēnāka nekā dzīva organisma atbildes reakcijas.
Taču simulatori ir pietiekoši pietuvināti, lai būtu ļoti būtisks un vajadzīgs rīks, kā ārsti uzlabo savu sniegumu,” skaidro Sentluisas Bērnu slimnīcas pediatrs Metjū Goldsmits.
15-20 gadu laikā simulatori ir ļoti mainījušies. Ir pat tādi, kur var ielikt katetrus ar simulētām asinīm, vai tādi, kuros acu zīlītes reaģē uz gaismu. Mākslīgās asinis nav tālu jāmeklē – RSU ir roka, kurā mācīties atrast vēnu un ievadīt tajā medikamentus.
Medicīnas simulācijas ir salīdzinoši jauna joma, kas sevi pieteikusi pēdējās desmitgadēs. Tās nebūtu iespējamas, ja nebūtu attīstījusies programmēšana un nebūtu pieaudzis datu apstrādes ātrums.
Materiāli, programmatūra, elektronika – tas viss kļūst neaizvietojams, radot rīkus, kas spēj aizstāt un pat glābt cilvēkus.